نویسنده : www.BartarFile.ir
تاریخ : یک شنبه 30 خرداد 1400
کارگاه مکانیک عمومی، منبعی مفید، جامع و کاربردی از درس کارگاه عمومی انتشارات دانشگاه پیام نور می باشد. در 7 فصل، مشتمل بر 153 صفحه، با فرمت pdf، به زبان فارسی، همراه با ذکر نکات مهم و کاربردی، همچنین سئوالات تشریحی پایان فصل به ترتیب زیر گردآوری شده است:
نویسنده : www.BartarFile.ir
تاریخ : یک شنبه 30 خرداد 1400
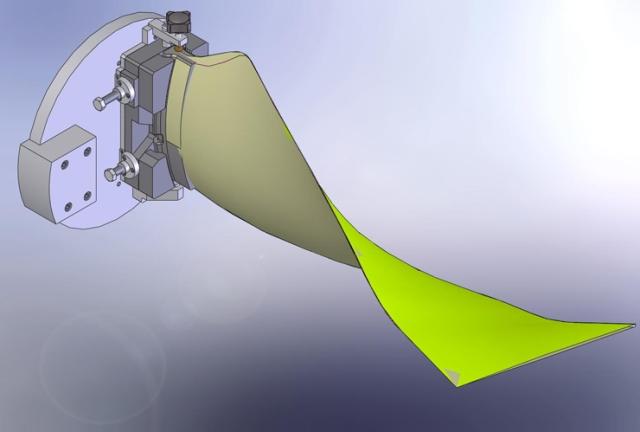
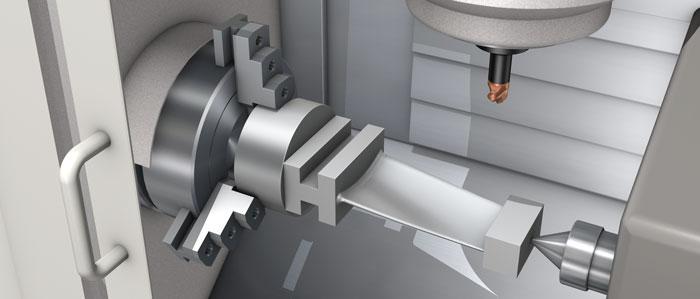
ساخت پرههای توربین به دلیل بارهای مکانیکی و دینامیکی زیادی که بر آنها وارد میشود از اهمیت زیادی برخوردار است. نواحی مختلف پره شامل شرود و مناطق آب بندی، ایرفویل، شاتک و سوراخ های خنک کاری و ریشه می باشد که هر منطقه بسته به جنس پره و نوع استفاده پره (صنایع هوایی یا سایر صنایع، کمپرسور یا توربین) به روش های مختلف ساخته می شود. در حالت کلی برای ساخت پره توربین یا کمپرسور ابتدا ماده خام را به یکی از روش های آهنگری یا ریختهگری دقیق به شکل اولیه موردنظر در میآورند. سپس برای اینکه قسمت های مختلف پره را به اندازه نهایی برسانند از روش های مختلف ماشینکاری استفاده مینمایند. دقیقترین قسمت پره به لحاظ ابعادی، قسمت ریشه آن میباشد که معمولاً از روش سنگزنی خزشی برای ماشینکاری آن استفاده میشود. به طور کلی ساخت پرههای متحرک موتورهای توربین گازی با توجه به شکل پیچیده و شرایط کاری حاد از تکنولوژی بالایی برخوردار است.
در این میان ریشه پره با توجه به نیروهایی که به آن وارد میشود نسبت به بقیه قسمت های پره دارای کیفیت سطح و دقت ابعادی بالایی میباشد. تاکنون کیفیت سطح نامناسب مانع از به کارگیری روش تخلیه الکتریکی (وایرکات) برای ماشینکاری ریشه پره میشد. اما اخیراً با توجه به پیشرفت های به وجود آمده در مولد ماشین های وایرکات، استفاده از این روش برای ماشین کاری ریشه پره مورد توجه قرار گرفته است. معمولاً برای ساخت ریشه پره توربین، از روش سنگزنی خزشی و قسمت کمپرسور از روش خانکشی استفاده میشود اما اخیراً در خارج از کشور ساخت ریشه پره با روش تخلیه الکتریکی مورد توجه قرار گرفته است. یکی از عواملی که تاکنون مانع از استفاده این روش برای ماشینکاری ریشه پره میشد، کیفیت سطح نامناسب با توجه به حرارتی بودن این روش است. اما اخیراً با توجه به پیشرفت هایی که در مولد این ماشین ها بوجود آمده است استفاده از آن را برای ماشینکاری ریشه پره امکانپذیر ساخته است. برای ماشینکاری ریشه پره کمپرسور که از جنس فولاد زنگ نزن است معمولاً از روش خانکشی استفاده میشود از مزایای این روش یک سرعت بالا، دقت فرم ها و سطوح تولید شده به وسیله خانکشی در حد مطلوب و عمر ابزار طولانی و قابلیت و سهولت در ایجاد پروفیل های نامنظم بدون نیاز به اپراتور ماهر میباشد...
نویسنده : www.BartarFile.ir
تاریخ : یک شنبه 30 خرداد 1400
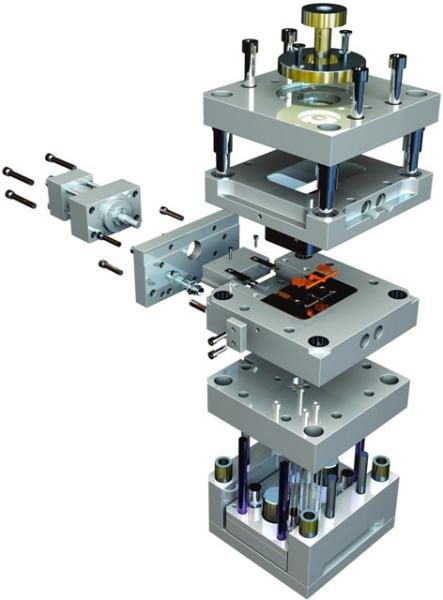
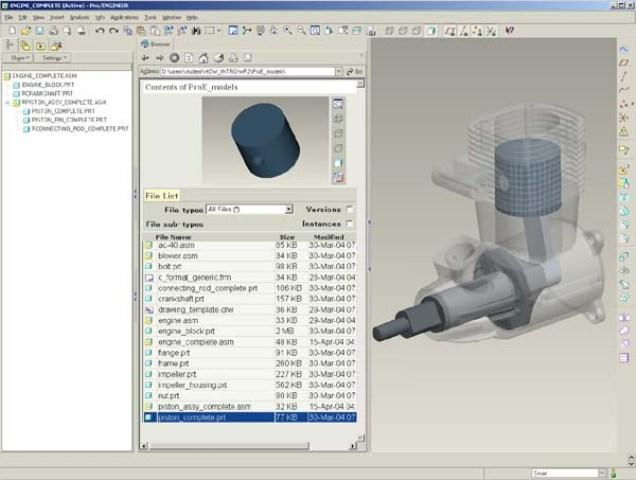
قدم اول: معرفی نرم افزار پرواینجینیر ProEngineer:
نرم افزار Pro/Engineer از جمله نرم افزارهای پیشرفته در زمینه CAD\CAM می باشد که برای طراحی، محاسبه و تولید قطعات صنعتی به کار گرفته می شود. این نرم افزار که از جمله نرم افزارهای Grade-A در طراحی و تولید می باشد دارای قابلیت های مدل سازی (Solid & Surface) بسیار قوی است و همچنین قابلیت ماشینکاری با انواع دستگاه های CNC را دارد. از مزایای این نرم افزار می توان به موارد زیر اشاره نمود:
یکی از عمده ترین تفاوت های این نرم افزار با نرم افزارهای مشابه در این می باشد که مدل سازی در Pro/E بر اساس مدل سازی سه بعدی صلب (Solid) بنا شده است، در صورتی که اکثر نرم افزارهای دیگر کار مدل سازی را تنها با استفاده از سطح سازی انجام می دهند.
در مدل ساخته شده توسط این نرم افزار تمام ابعاد به صورت پارامتر تعریف می شوند، بدین ترتیب اگر در ساخت مدل سه بعدی رابطه ای بین این پارامترها وجود داشته باشد به راحتی می توان با تغییر یکی از این پارامترها، دیگر پارامترها یا ابعاد را تغییر داد. در این نرم افزار کوچکترین تغییر در مدل طراحی شده در هر زمانی از مراحل تکاملی ساخت قطعه یا سیستم به صورت خودکار روی قسمت های دیگر مانند اسمبلی، نقشه دو بعدی و روی اطلاعات ساخت به صورت هم زمان اعمال می گردد.
این نرم افزار قادر به تهیه هرگونه نما و برش در جهات دید مختلف با استفاده از اطلاعات مدل سه بعدی قطعه می باشد.
ایجاد شیب ها، Round و پخ های مورد نیاز در سطوح جدایش.
اعمال انقباض (shrinkage) در سه جهت مختصاتی.
طراحی و ایجاد مدل ماهیچه، تکیه گاه و سر ماهیچه و همچنین اعمال لقی های مورد نیاز.
اضافه نمودن سیستم راهگاهی، تغذیه و دیگر اجزای متالوژیکی مورد نیاز در ریخته گری.
تست نهائی روی شیب خروجی قطعه از قالب.
ارسال مدل و مجموعه های آماده شده جهت ماشینکاری و ایجاد فایل های حاوی مسیر حرکت ابزار برای ماشین های مختلف CNC و همجنین استفاده از خروجی های متفاوت نسبت به دستگاه های CNC اعم از G-Code و غیره. توضیحات بالا گوشه ای از توانمندی های نرم افزار پیشرفته ProEngineer می باشد.
قدم دوم: معرفی فایل آموزشی که کاربران می توانند دانلود نمایند:
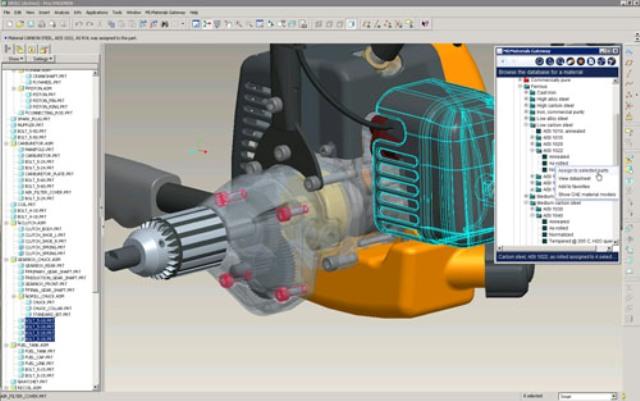
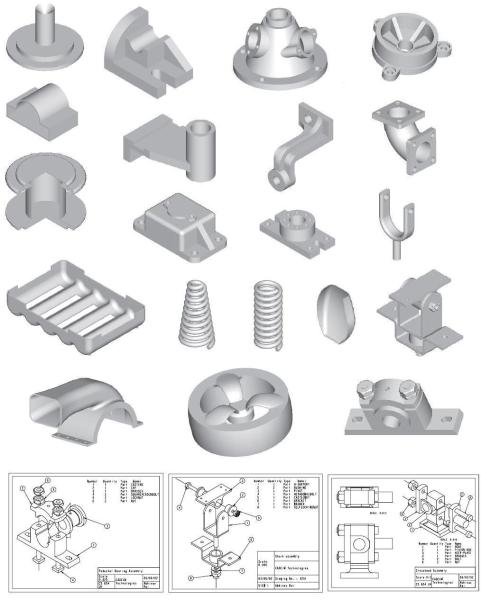
آموزش جامع (مدلسازی، مونتاژ، نقشه کشی) نرم افزار ProEngineer، یک آموزش جامع و کم نظیر از آموزش نرم افزار ProEngineer می باشد. الگوی آموزشی مبتنی بر آموزش با مثال می باشد. همانطور که در تصاویر زیر مشخص است در این آموزش، کاربر ProEngineer با نحوه طراحی و مدل سازی، سطح سازی و ایجاد نقشه های اجرایی قطعات مطابق تصاویر زیر در محیط ProEngineer آشنا می شود. این آموزش مشتمل بر 522 صفحه، در 12 بخش، به زبان انگلیسی روان و به همراه تصاویر رنگی هر محیط و نوار ابزارها، به ترتیب زیر گردآوری شده است:
نویسنده : www.BartarFile.ir
تاریخ : جمعه 27 خرداد 1400
افراد عادی وقتی نام ماشین های ابزار به گوش شان می خورد به یاد ماشین تراش یا تراشکاری می افتند، البته حق دارند به دلیل اینکه ماشین تراش در بین مهندسین و فنی کاران به قلب ماشین های ابزار و یا سلطان ماشین های ابزار مشهور است. ولی این ماشین ها دارای گروه بندی گسترده ای می باشند که در زیر تعریف کلی از ماشین های ابزار و تقسیم بندی آنها آورده شده است:
تعریف کلی ماشین ابزار:
کلیه ماشین هایی که به طور مکانیکی بر روی قطعات شکل دهی یا براده برداری انجام می دهند ماشین های ابزار نام داند. به عبارت دیگر، کلیه ماشین هایی که برای یک فرآیند کاری تراشکاری، فرزکاری، سوراخکاری، پرسکاری و... مورد استفاده قرار می گیرند به عنوان ماشین های ابزار شناخته می شوند.
تقسیم بندی ماشین های ابزار بر اساس فرآیند کار:
ماشین های ابزار برای تولید بدون براده برداری: مانند چکش ها، پرس ها، ماشین های خم کاری، قیچی ها، گیوتین و...
ماشین های ابزار برای تولید با براده برداری: مانند ماشین تراش، صفحه تراش، ماشین فرز، ماشین سنگ و...
تقسیم بندی ماشین های ابزار بر اساس هدف کاری:
ماشین های یونیورسال: برای محدوده کاری وسیع و متنوع و چند مرحله ای طراحی شده اند.
ماشین های چندکاره: به عنوان ماشین های سری کاری نیمه انبوه قطعات به کار می روند.
ماشین های مخصوص: ماشین هایی که در حقیقت برای انجام یک سری عملیات متنوع روی یک قطعه کار به کار می روند. محدوده کاری این ماشین ها تولید انبوه می باشد.
پروژه ماشین های ابزار (Machine Tools)، مشتمل بر 5 بخش، 145 اسلاید، به زبان فارسی، تایپ شده، به همراه تصاویر، با فرمت powerpoint به ترتیب زیر گردآوری شده است:
بخش 1: ماشین های تراش (Lathe Machine)
بخش 2: ماشین های فرز (Milling Machine)
بخش 3: ماشین های صفحه تراش (Shaper Machine)
بخش 4: طراحی بستر ماشین های ابزار و بررسی ارتعاشات ماشین تراش
بخش 5: پیچ تراشی (Bolt Cutters)
* توجه: لازم به ذکر است که علاوه بر فایل پروژه بالا، 7 مقاله با عناوین زیر در رابطه با ماشین های ابزار (79 صفحه، به زبان فارسی و انگلیسی) نیز جهت دانلود قرار داده شده است:
مقاله 1: بررسی پایداری دینامیکی اسپیندل ماشین های ابزار در ماشینکاری با سرعت بالا
مقاله 2: بررسی فرآیند آج زنی سطوح تخت با ماشین ابزار گرد تراش
مقاله 3: ماشین های ابزار با مکانیزم های موازی و روش های کالیبراسیون آنها
مقاله 4: تاثیر ترک در بی ثباتی اسپیندل ماشین های ابزار با یاتاقان های گازی
مقاله 5: طراحی و پیاده سازی سیستم جستجو ابزارهای برشی
مقاله 6: برآورد فاجعه بار شکست در قطعات مکانیکی ترد ماشین های ابزار
مقاله 7: رفتارهای دینامیکی گشتاور محرک ماشین ابزار در حرکت های میکروسکوپی
جهت دانلود پروژه ماشین های ابزار (Machine Tools)، بر لینک زیر کلیک نمایید.
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 13 ارديبهشت 1400
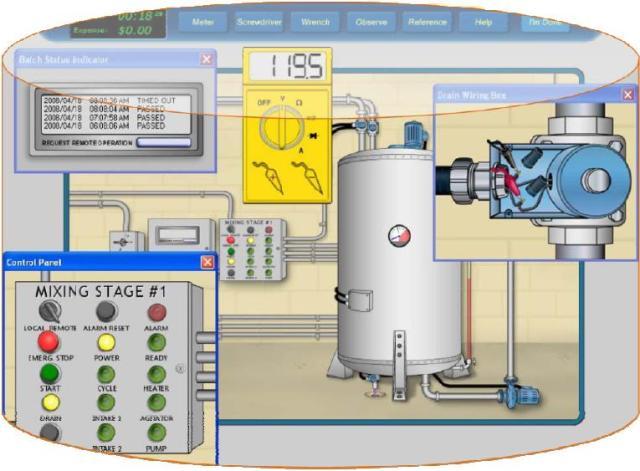
پیشرفت دانش و تکنولوژی سبب شده است که فرآیندهای تولید، پیچیده و دقیق تر شوند و در نتیجه کنترل آنها سخت تر و پیچیده تر شده است. به طوری که سیستم های کنترل سنتی مانند سیستم های رله ای و سیستم های مبتنی بر مدارهای منطقی قادر نیستند نیازهای صنایع امروزی را برآورده سازند. همچنین در سیستم های کنترل سنتی تغییر دستور العمل های کنترل و یا گسترش آن که لازمه یک صنعت پویاست مستلزم انجام تغییرات زیاد در سخت افزار و صرف هزینه بالاست. در سیستم های کنترل صنعتی، سنسورها با توجه به نیاز صنایع پیشرفته ابداع گردیده و تولید شده اند. سنسورها در سیستم های صنعتی بیشتر عملکرد آن به صورت نرم افزاری تعیین می شود و به این علت یک سنسور یا مجموعه ای از سنسورها را می توان با کاربردهای مختلف منطبق نمود و استفاده کرد...
جزوه آموزشی کنترل صنعتی (Industrial Control)،جزوه ای مفید و کاربردی از درس کنترل صنعتی دانشکده فنی تبریز است. این جزوه مشتمل بر 105 صفحه، با فرمت pdf، به زبان فارسی، همراه با ذکر نکات و فرمول های مهم و کاربردی به ترتیب زیر گردآوری شده است:
نویسنده : www.BartarFile.ir
تاریخ : دو شنبه 13 ارديبهشت 1400
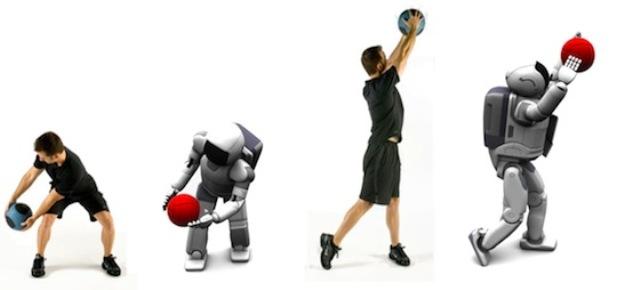
در حال حاضر، بررسی ابعاد مختلف تحقیقات روباتیک توسط متخصصان زمینه های گوناگون انجام می پذیرد. معمولا نمی توان فردی را پیدا کرد که بر کل زمینه رباتیک مسلط باشد. از این رو این رشته به رشتههای فرعی تقسیم شده است. به طور مجرد میتوان رباتیک را به چهار رشته فرعی اعمال مکانیکی، انتقال و حرکت، بینایی کامپیوتر و هوش مصنوعی تقسیم کرد. در این کتاب رشته فرعی علم و مهندسی اعمال مکانیکی معرفی میشود. مبانی این رشته فرعی روباتیکی در چندین زمینه کلاسیک مختلف یافت میشود که اصلی ترین آنها مکانیک، نظریه کنترل و علوم کامپیوتر است.
کتاب مکانیک و کنترل در رباتیک (Mechanics and Control in Robotics)، در این کتاب فصلهای ۱ تا ۸ عنوانهایی از مهندسی مکانیک و ریاضیات، فصلهای ۹ تا ۱۱ موضوعاتی در نظریه کنترل و فصلهای ۱۲ تا ۱۳ مطالبی در علوم کامپیوتری را در بر میگیرند. به علاوه، در این کتاب بر جنبههای محاسباتی مسائل تاکید شده است و در پایان فصلهایی که بیشتر درباره مکانیک بحث کرده اند، بخشی کوتاه ویژه مسائل محاسباتی در نظر گرفته شده است. این کتاب مشتمل بر 570 صفحه، در 13 فصل، به زبان فارسی، همراه با تصاویر به ترتیب زیر گردآوری شده است:
فصل اول: مقدمه
زمینه
مکانیک و کنترل بازوهای مکانیکی ماهر
نمادگذاری
فصل دوم :توصیف ها و تبدیل های فضایی کلی
مقدمه
توصیف ها: مکان ها، جهت گیری ها و چهار چوب ها
نگاشت ها: تغییر دادن توصیف ها از چهارچوبی به چهارچوب دیگر
عملگرها: انتقال ها، دوران ها و تبدیل های کلی
خلاصه تعبیرها
عملیات ریاضی در تبدیل کلی
معادله های تبدیل
مطالبی دیگر درباره نمایش جهت گیری
تبدیل بردارهای آزاد
ملاحظات محاسباتی
فصل سوم: سینماتیک بازوهای مکانیکی ماهر
مقدمه
توصیف رابط
توصیف اتصال رابط
قرارداد برای اتصال چهارچوب ها به رابط ها
سینماتیک بازوهای مکانیکی ماهر
فضای کاراندازی، فضای مفصلی و فضای دکارتی
مثال ها: سینماتیک دو روبات صنعتی
چهارچوب های با نام های استاندارد
ابزار کجاست؟
ملاحظات محاسباتی
فصل چهارم: سینماتیک وارون بازوهای مکانیکی ماهر
مقدمه
حل پذیر بودن
نمادگذاری زیر فضای بازوی مکانیکی ماهر در حالت 6 >n
راه حل جبری در مقابل راه حل هندسی
راه حل جبری از طریق تبدیل به چند جمله ای
روش حل پایپر برای سه محور متقاطع در یک نقطه
مثال هایی از سینماتیک وارون بازوهای مکانیکی ماهر
چهارچوب های استاندارد
استفاده از زیر برنامه SOLVE برای بازو های مکانیکی ماهر
دقت و تکرارپذیری
ملاحظات محاسباتی
فصل پنجم: ژاکوبی ها، سرعت ها و نیروهای استاتیکی
مقدمه
نمادگذاری برای مکان و جهت گیری متغیر با زبان
سرعت خطی و دورانی اجسام صلب
مطالبی بیشتر درباره سرعت زاویه ای
حرکت رابط های روبات
چگونگی اشاعه سرعت از رابطی به رابط دیگر
ژاکوبی ها
حالت های تکین
نیروهای استاتیکی در بازوهای مکانیکی ماهر
ژاکوبی ها در حوزه نیرو
تبدیل دکارتی سرعت ها و نیروهای استاتیکی
فصل ششم: دینامیک بازوهای مکانیکی ماهر
مقدمه
شتاب جسم صلب
توزیع جرم
معادله نیوتن معادله اویلر
محاسبات دینامیکی تکراری نیوتن اویلر
معادله های تکراری و معادله های به شکل بسته
مثالی از معادله های دینامیکی بسته
ساختار معادله های دینامیکی بازوهای مکانیکی ماهر
روش لاگرانژ در به دست آوردن معادله های دینامیکی بازوهای مکانیکی
بدست آوردن معادله های دینامیکی بازوهای مکانیکی در فضای دکارتی
شمول اثرات جسم غیر صلب
شبیه سازی دینامیکی
ملاحظات محاسباتی
فصل هفتم: تولید مسیر
مقدمه
ملاحظات کلی درباره توصیف و تولید مسیر
روش های فضای مفصلی
روش های فضای دکارتی
مشکلات هندسی مسیرهای دکارتی
تولید مسیر در هنگام اجرای برنامه کامپیوتری
توصیف مسیر با زبان برنامه ریزی روبات
طرح ریزی مسیر با استفاده از مدل دینامیکی
طرح ریزی مسیرهای عاری از برخورد
فصل هشتم: مکانیزم بازوهای مکانیکی ماهر
مقدمه
طراحی بر پایه عملیات خواسته شده از روبات
پیکربندی سینماتیکی
معیارهای کمی مشخصات فضای کاری
سازه های زنجیری زاید و بسته
روش های کارانداز
سختی و تغییر شکل خمشی
حس مکان
حس نیرو
فصل نهم: کنترل خطی بازوهای مکانیکی ماهر
مقدمه
کنترل مدار بسته و پس خوراند (فید بک)
سیستم های خطی درجه دوم
کنترل سیستم های درجه دوم
تقسیم قانون کنترل
کنترل تعقیب مسیر
دفع اغتشاش
کنترل زمانی پیوسته و ناپیوسته (منقطع)
مدل سازی و کنترل یک مفصل تنها
ساختمان کنترل کننده یک روبات صنعتی
فصل دهم: کنترل غیر خطی بازوهای مکانیکی ماهر
مقدمه
سیستم های غیر خطی و متغیر با زمان
سیستم های کنترل چند ورودی چند خروجی
کنترل بازوهای مکانیکی ماهر
ملاحظات عملی
سیستم های کنترل روبات های صنعتی امروزی
تحلیل پایداری لیاپونوف
سیستم های کنترل مبتنی بر مختصات دکارتی
کنترل تطبیقی
فصل یازدهم: کنترل نیرو در بازوهای مکانیکی ماهر
مقدمه
کاربرد روبات های صنعتی در عملیات مونتاژ
چهارچوب اعمال کنترل در عملیات مقید شده جزئی
مسئله کنترل ترکیبی مکان نیرو
کنترل نیروی سیستم جرم فنر
روش های کنترل ترکیبی مکان نیرو
روش های کنترل روبات های صنعتی کنونی
فصل دوازدهم: سیستم ها و زبان های برنامه ریزی روبات
برتر فایل یک سایت مرجع با هدف انتشار تحقیق، مقاله، پایان نامه، پاورپوینت، جزوه، کتاب و همچنین فایل های آموزشی از نرم افزار پیشرفته CATIA در زمینه رشته مهندسی مکانیک است که به منظور دسترسی راحت تر، سریع تر و ارزان تر شما دانشجویان و پژوهشگران به تحقیقات مد نظرتان تاسیس شده است.




















 آمار
وبلاگ:
آمار
وبلاگ: